跳到内容
长春市众有科技有限公司官网
主页
视频中心
云台
JDSZ301
单镜头双传感
镜头
可见光
30口径
120毫米
150毫米
200毫米
40口径
300毫米
400毫米
500毫米
600毫米
50口径
240毫米
300毫米
420毫米
500毫米
600毫米
70口径
600毫米
660毫米
800毫米
1000毫米
1200毫米
120口径
1200毫米
1500毫米
1800毫米
近红外
40口径
300毫米
400毫米
500毫米
600毫米
50口径
240毫米
300毫米
420毫米
500毫米
600毫米
70口径
660毫米
1000毫米
600毫米
800毫米
1200毫米
120口径
1200毫米
1500毫米
1800毫米
短波红外
40口径
120毫米
300毫米
400毫米
500毫米
600毫米
50口径
300毫米
420毫米
500毫米
70口径
1200毫米
120口径
1200毫米
1500毫米
1800毫米
变焦镜头选型助手:
【变焦镜头评估计算器】
可扫二维码,下载到您的手机中使用
长春众有变焦镜头仿真计算器
4K变焦镜头设计评估及光学参数计算器【电脑网页版1.0】
联系人:董有 13331697285 (微信)
邮箱:312282332@qq.com
产品选型:
www.cczhongyou.com
镜头参数计算器
计算
重置
传感器尺寸 (mm)
焦距 (mm)
▲
▼
视场角 (°)
视场角【mrad】
传感器参数计算器
计算
重置
水平像素数
垂直像素数
像元尺寸(μm)
传感器宽度
传感器高度
传感器对角线
镜头探测能力【目标分辨率】计算器
计算
重置
目标尺寸【米】
目标距离【米】
像元规格【微米】
镜头焦距【mm】
目标像素数
可见光变焦镜头评估计算器
计算
重置
长焦焦距 (mm)
像元尺寸 (μm)
镜头口径 (mm)
短焦焦距 (mm)
变焦比
▲
▼
成像靶面尺寸
镜头长度 (mm)
镜头质量 (g)
设计限制
4 ≤ 焦距 ÷ 口径 ≤ 15
长焦焦距范围:200-1800mm
像元尺寸范围:1.5-6μm
镜头口径范围:40-120mm
靶面尺寸:≤24mm
使用者须知
展开
1
适 用 对 象:
极致轻量化变焦镜头参数评估
2
高 效 可 信:
秒出结果,偏差<10%
3
清ㅤ晰ㅤ度:
无色差4K千万像素清晰度
4
光 谱 范 围:
覆盖400-1100nm
5
口 径 范 围:
40-120mm【可选择】
6
长 焦 焦 距:
200-1800毫米【可选择】
7
像 元 规 格:
1.5-6微米【可选择】
8
变焦比规则:
≤1/2口径【可调整】
9
长 焦 规 则:
≤口径直径×15
10
口 径 规 则:
长焦焦距÷口径≥4
11
靶 面 规 格:
≤24毫米
12
专 属 声 明:
只适合本公司技术体系
13
光 学 尺 寸:
1″=16mm,18mm【<1/2″】
产品中心
军用电动变焦镜头
近红外电动变焦镜头
短波红外电动变焦镜头
网络一体化机芯
军用云台转台
大功率红外激光照明 云台摄像机
可见光系列:
可见光:30毫米口径系列13倍变焦
可见光:30毫米口径系列13倍变焦
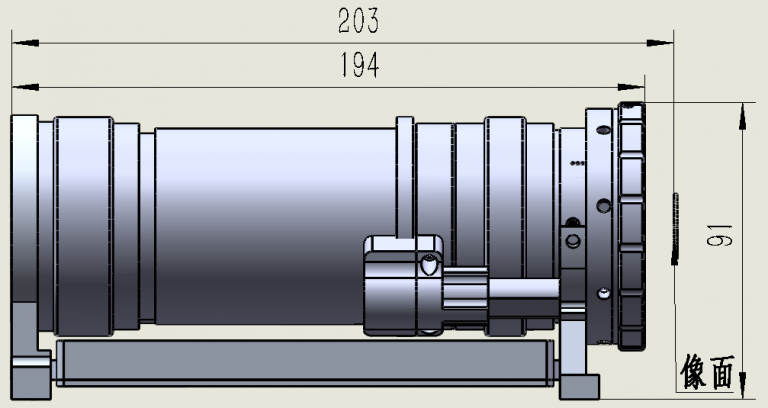
30毫米口径:f9-120mm焦距 2K清晰度 13倍变焦镜头
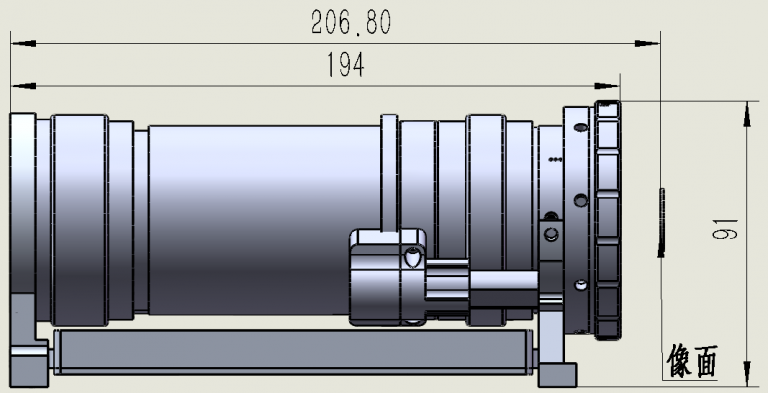
30毫米口径 :f11-150mm焦距 2K清晰度13倍变焦镜头
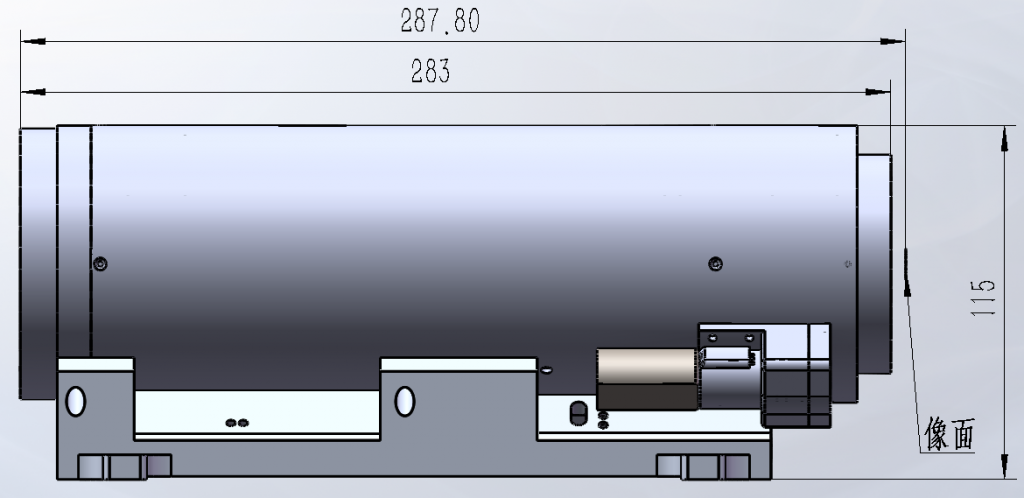
30毫米口径 :f15-200mm焦距 2K清晰度13倍变焦镜头
30毫米口径:f9-120mm焦距 2K清晰度13倍变焦镜头
30毫米口径 :f11-150mm焦距 2K清晰度13倍变焦镜头
30毫米口径 :f15-200mm焦距 2K清晰度13倍变焦镜头
可见光:40毫米口径系列20倍变焦
可见光:40毫米口径系列20倍变焦
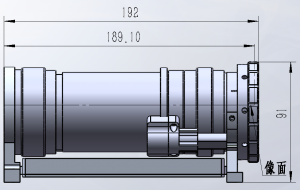
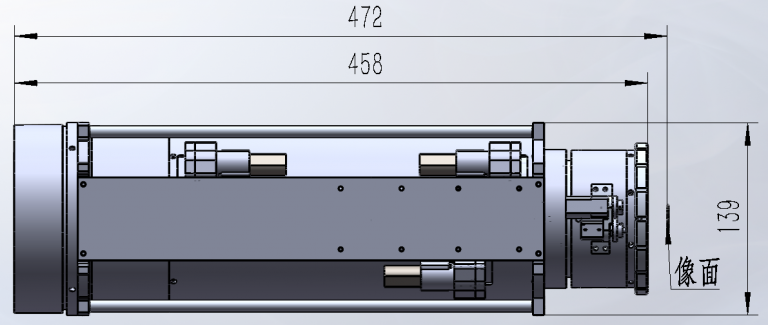
40毫米口径:f15-300mm焦距 1200万像素变焦镜头
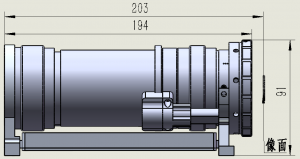
40毫米口径:f20-400mm焦距 1200万像素变焦镜头
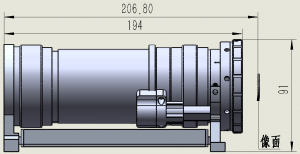
40毫米口径:f25-500mm焦距 1200万像素变焦镜头
40毫米口径:f15-300mm焦距 1200万像素变焦镜头
40毫米口径:f20-400mm焦距 1200万像素变焦镜头
40毫米口径:f25-500mm焦距 1200万像素变焦镜头
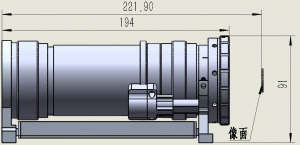
40毫米口径:f30-600mm焦距 1200万像素变焦镜头
40毫米口径:f30-600mm焦距 1200万像素变焦镜头
可见光:50毫米口径系列30倍变焦
可见光:50毫米口径系列30倍变焦
50毫米口径 :f8-240mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f10-300mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f14-420mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f8-240mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f10-300mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f14-420mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f16.7-500mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f20-600mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f16.7-500mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f20-600mm焦距 4K清晰度30倍变焦镜头
可见光:70毫米口径系列60倍变焦
可见光:70毫米口径系列60倍变焦
70毫米口径:f10-600mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f11-660mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f13.3-800mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f10-600mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f11-660mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f13.3-800mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f16.7-1000mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f20-1200mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f16.7-1000mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f20-1200mm焦距 4K清晰度 60倍变焦镜头
可见光:120毫米口径系列48倍变焦
可见光:120毫米口径系列48倍变焦
120毫米口径:f25-1200mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f31-1500mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f37.5-1800mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f25-1200mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f31-1500mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f37.5-1800mm焦距 4K清晰度 48倍变焦镜头
近红外系列:
近红外:40毫米口径系列20倍变焦
近红外:40毫米口径系列20倍变焦
40毫米口径:f15-300mm焦距 1200万像素变焦镜头
40毫米口径:f20-400mm焦距 1200万像素变焦镜头
40毫米口径:f25-500mm焦距 1200万像素变焦镜头
40毫米口径:f15-300mm焦距 1200万像素变焦镜头
40毫米口径:f20-400mm焦距 1200万像素变焦镜头
40毫米口径:f25-500mm焦距 1200万像素变焦镜头
40毫米口径:f30-600mm焦距 1200万像素变焦镜头
40毫米口径:f30-600mm焦距 1200万像素变焦镜头
近红外:50毫米口径系列30倍变焦
近红外:50毫米口径系列30倍变焦
50毫米口径 :f8-240mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f10-300mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f14-420mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f8-240mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f10-300mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f14-420mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f16.7-500mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f20-600mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f16.7-500mm焦距 4K清晰度30倍变焦镜头
50毫米口径 :f20-600mm焦距 4K清晰度30倍变焦镜头
近红外:70毫米口径系列60倍变焦
近红外:70毫米口径系列60倍变焦
70毫米口径:f10-600mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f11-660mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f13.3-800mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f10-600mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f11-660mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f13.3-800mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f16.7-1000mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f20-1200mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f16.7-1000mm焦距 4K清晰度 60倍变焦镜头
70毫米口径:f20-1200mm焦距 4K清晰度 60倍变焦镜头
近红外:120毫米口径系列48倍变焦
近红外:120毫米口径系列48倍变焦
120毫米口径:f25-1200mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f31-1500mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f37.5-1800mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f25-1200mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f31-1500mm焦距 4K清晰度 48倍变焦镜头
120毫米口径:f37.5-1800mm焦距 4K清晰度 48倍变焦镜头
短波红外系列:
短波红外:40毫米口径20倍变焦
短波红外:40毫米口径20倍变焦
40毫米口径:f6-120mm焦距 200万像素变焦镜头
40毫米口径:f15-300mm焦距 200万像素变焦镜头
40毫米口径:f20-400mm焦距 200万像素变焦镜头
40毫米口径:f6-120mm焦距 200万像素变焦镜头
40毫米口径:f15-300mm焦距 200万像素变焦镜头
40毫米口径:f20-400mm焦距 200万像素变焦镜头
40毫米口径:f25-500mm焦距 200万像素变焦镜头
40毫米口径:f30-600mm焦距 200万像素变焦镜头
40毫米口径:f25-500mm焦距 200万像素变焦镜头
40毫米口径:f30-600mm焦距 200万像素变焦镜头
短波红外:50毫米口径30倍变焦
短波红外:50毫米口径30倍变焦
50毫米口径 :f10-300mm 200万像素变焦镜头
50毫米口径 :f14-420mm 200万像素变焦镜头
50毫米口径 :f16.7-500mm 200万像素变焦镜头
50毫米口径 :f10-300mm 200万像素变焦镜头
50毫米口径 :f14-420mm 200万像素变焦镜头
50毫米口径 :f16.7-500mm 200万像素变焦镜头
短波红外:70毫米口径60倍变焦
短波红外:70毫米口径60倍变焦
70毫米口径 :f10-600mm 200万像素变焦镜头
70毫米口径 :f10-600mm 200万像素变焦镜头
短波红外:120毫米口径48倍变焦
短波红外:120毫米口径48倍变焦
120毫米口径:f25-1200mm焦距 200万像素 48倍变焦镜头
120毫米口径:f31-1500mm焦距 200万像素 48倍变焦镜头
120毫米口径:f37.5-1800mm焦距 200万像素 48倍变焦镜头
120毫米口径:f25-1200mm焦距 200万像素 48倍变焦镜头
120毫米口径:f31-1500mm焦距 200万像素 48倍变焦镜头
120毫米口径:f37.5-1800mm焦距 200万像素 48倍变焦镜头